




|
[ บทความ : Robot ] ตอนที่ 3 เรื่อง ... การควบคุม ET-ROBOT RD2 (การควบคุมการเคลื่อนที่ของรถหุ่นยนต์์ด้วยเส้น) |
| การควบคุมการเคลื่อนที่ของรถหุ่นยนต์ด้วยเ็ส้น |
|
สำหรับแนวทางและวิธีการในการเขียนโปรแกรมเพื่อใช้
ควบคุมการเคลื่อนที่ของรถหุ่นยนต์์
ให้เคลื่อนที่ไปตามแนวของเส้นที่กำหนดเอาไว้
ก็เป็นอีกรูปแบบหนึ่งของการเขียนโปรแกรมสำหรับควบคุมการเคลื่อนที่ของรถหุ่นยนต์์อย่างมีเงื่อนไข
ซึ่งการที่จะสามารถเขียนโปรแกรมเพื่อควบคุมให้รถหุ่นยนต์์เคลื่อนที่ ไปตามแนวเส้นที่กำหนดไว้นั้น
ในอันดับแรกผู้อ่านจะต้องเข้าใจถึงพื้นฐานในการควบคุมการเคลื่อนที่ของรถหุ่นยนต์์เสียก่อน
ไม่ว่าจะเป็นการเคลื่อนที่ไปข้างหน้า
เคลื่อนที่ถอยหลัง
การควบคุมให้รถเลี้ยวซ้าย
หรือเลี้ยวขวา เป็นต้น
ซึ่งในบทนี้จะไม่ขอกล่าวถึงวิธีการในเรื่องเหล่านี้
โดยผู้อ่านสามารถย้อนกลับไปทำความเข้าใจในหัวข้อการทดลองเรื่อง
“การควบคุมการเคลื่อนที่ของรถหุ่นยนต์์”
ได้
และจำเป็นอย่างยิ่งที่ผู้อ่านจะต้องทำความเข้าใจกับวิธีการควบคุมการเคลื่อนที่ของรถหุ่นยนต์์ในลักษณะต่างๆดังได้กล่าวมาแล้วขางต้น ไม่เช่นนั้นแล้วอาจไม่สามารถเข้าใจและทำการทดลองในหัวข้อนี้ได้อย่างมีประสิทธิภาพเท่าที่ควร
เปลี่ยนไปได้ตามสถานะการณ์และความเหมาะสม
โดยผู้อ่านสามารถคิดค้นและพัฒนาเทคนิควิธีต่างๆขึ้นมาใช้งานเองได้
สำหรับตัวอย่างที่จะแสดงให้เห็นในหัวข้อการทดลองของบทนี้
ถือว่าเป็นเพียงตัวอย่างหรือแนวทางเบื้องต้น
ในการเขียนโปรแกรมควบคุมเท่านั้น
ซึ่งผู้อ่านอาจใช้เป็นแนวทางในการทดลองเพื่อประกอบความเข้าใจในเบื้องต้น
ซึ่งถ้าเห็นว่ามีข้อดีก็สามารถจดจำและนำไปใช้งานในโอกาสต่อไปได้
หรือถ้าผู้อ่านยังเห็นว่าตัวอย่างยังมี
ข้อจำกัดหรือข้อบกพร่องอยู่ก็อาจนำไปพัฒนาปรับปรุงให้มีความสามารถ มากยิ่งขึ้น
หรือถ้าหากผู้อ่านสามารถคิดค้นหรือมีวิธีการอื่นๆที่ดีกว่า
ก็สามารถพัฒนาเทคนิคเหล่านั้นขึ้นมาใช้งานทดแทนเองก็ได้ไม่ถือว่าผิดอะไร
โดยทุกอย่างควรยึดเอาผลการทำงานของโปรแกรมเป็นเครื่องชี้วัด
ว่าการทำงานของโปรแกรมสามารถตอบสนองต่อเงื่อนไขที่กำหนดไว้ได้เพียงใดมากกว่า การเขียนโปรแกรมเพื่อตรวจสอบเงื่อนไขการตรวจจับเส น เพื่อใช้เป็นทางเลือกในการสั่งงานรถหุ่นยนต์์ให้เคลื่อนที่ไปในทิศทางต่างๆในภายหลัง |
| การตรวจจับเส้น
(TRACKER SENSOR) |
|
ในการตรวจจับเส้น (TRACKER)
นั้น บอร์ด ET-ROBOT RD2
ได้จัดเตรียมขั้วต่อ TRACKER3
ซึ่งเป็นขั้วต่อสำหรับเชื่อมต่อกับบอร์ดตรวจจับเส้นขนาด
3 จุด ของอีทีที รุ่น R-TRACKER3
ไว้ให้ภายในบอร์ดแล้ว
โดยบอร์ดตรวจจับเส้น รุ่น R-TRACKER3
นั้น
จะให้ผลการทำงานของการตรวจจับเป็นสัญญาณโล จิก
กล่าวคือจะให้ผลการทำงานเพียง
2 สภาวะ คือ จริง กับ เท็จ
โดยบอร์ด R-TRACKER3
เป็นวงจรตรวจจับเส้น
โดยจะใช้หลักการส่งและสะท้อนกลับของแสงอินฟราเรด
ซึ่งภายในบอร์ด R-TRACKER3
นั้นจะมีการติดตั้งชุดตรวจจับเส้นแบบอินฟราเรดไว้
3 จุด ด้วยกัน
เพื่อเพิ่มความสามารถในการตรวจจับให้มากขึ้น
โดยจะอาศัยหลักการในการสะท้อนกลับของสัญญาณอินฟราเรด
ซึ่งคุณสมบัติของแสงอินฟราเรดนี้จะไม่มี การสะท้อนกลับในวัตถุหรือพื้นผิวที่เป็นสีดำ
ดังนั้นเราจึงสามารถทำการตรวจสอบหรือแยกความแตกต่างระหว่างวัตถุ
หรือพื้นผิวที่เป็นสีขาวและสีดำได้
แต่เนื่องจากในสถานที่ต่างๆ
นั้นจะมีความเข้มข้นหรือปริมาณของแสงที่ไม่เท่ากัน
ซึ่งจะมีผลต่อการทำงานของวงจรอินฟราเรด
ดังนั้นเราจึงได้ออก
แบบวงจรตรวจจับให้สามารถทำการปรับระดับความไวในการตรวจจับได้
โดยการปรับที่ตัวต้านทานปรับค่าได้แบบเกือกมาค่า
10KOHM เพื่อให้มีความอ่อนตัวเมื่อนำไปใช้ในสถานที่ต่างๆ
มากขึ้น |
 รูปแสดง ลักษณะของแผงวงจรสำหรับตรวจจับเส้น (R-TRACKER3 BOARD) |
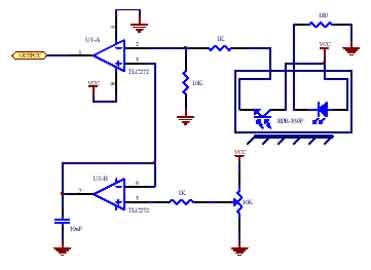 รูปแสดง วงจรสำหรับตรวจจับเส้นขนาด 1 จุด (TRACKER CIRCUIT) |
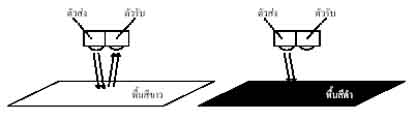 รูปแสดง ลักษณะการสะท้อนของคลื่นอินฟราเรด |
|
สำหรับการปรับแต่งค่าระดับความเข็มของเส้นในการตรวจจับนั้น
จะขึ้นอยู่กับลักษณะความแตก |