




|
[ บทความ : Robot ] ตอนที่ 1 เรื่อง ... แกะกล่อง ET-ROBOT Stamp P40 |
ณ เวลาบ่ายแก่ๆ วันหนึ่ง หลังจากที่ปลงตกเรื่องงานการที่โถมประดังเข้ามา จนไม่รู้จะทำอะไรก่อนหลังดี ... แล้วงานวิจัยเราจะเสร็จเมื่อไรหนอ ... นี่ก็ปาเข้าไป ... (เซนเซอร์เอาไว้) แล้ว ... งานไม่เดินเลย ... เราเป็นอะไรไปหนอ ... ทำไมไม่ขยันเลยล่ะ ... อืมๆๆๆ ... และแล้วก็มีคนบอกว่า พัสดุมาแน่ะ ไปรับซะ ... ผมก็พาร่างอันอ้วนท้วน บวกกับความมึนงงไปรับพัสดุ ...
สิ่งที่ได้พบเจอนั้นเป็นกล่องพัสดุ กล่องโตชิ้นหนึ่ง ... ไม่ต้องแกะก็เดาได้ล่ะว่า มันเป็นของ ETT (เพราะ Logo บนพัสดุมันบอก :D) จากขนาดกล่องผมก็บอกกับตัวเองว่า ROBOT ของ ETT แหงเลย ... และแล้วผมก็แกะออกมาซะ ... ใช่จริงๆ ด้วย เอาล่ะ ในเมื่อมันเซ็งนักกับชีวิตนี้ มาประกอบหุ่นยนต์เล่นซะดีกว่า เผื่อจะได้ระบายความอัดอั้นออกไปเสียบ้าง ... (เข้าเรื่องซะที)
กล่องหน้าตาเป็นดังด้านล่างเลยครับ ... จะว่าไปแล้วกล่องนี่ก็เป็นขนาดมาตรฐานของ ETT ที่ใช้บรรจุผลิตภัณฑ์ จำพวกบอร์ดทดลอง แต่เปลี่ยนสี และมีชื่อของสินค้าแปะเอาไว้ข้างกล่อง

ว่าแล้วก็เปิดมันมาดูซะเลย ... เมื่อเปิดออกมาก็พบสภาพดังรูปต่อไปนี้ครับ
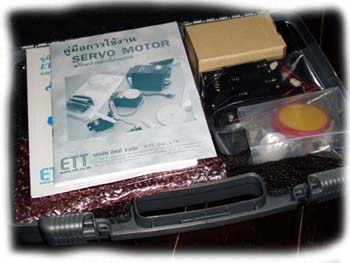
เอาล่ะมาดูกันว่า มีอะไรอยู่ในกล่องบ้าง ... ก่อนอื่นก็เป็นหนังสือ 2 เล่ม ซึ่งเป็นคู่มือของ มอเตอร์แบบ Servo กับคู่มือของ ET-ROBOT Stamp P40 ... ในเล่มแรกจะอธิบายเกี่ยวกับหลักการทำงานและการสั่งงานมอเตอร์แบบ Servo ในเล่มที่ 2 นั้นจะเป็นเรื่องการประกอบ,การใช้งาน และตัวอย่างโปรแกรมสำหรับควบคุมหุ่นยนต์แบบล้อเลื่อนตัวนี้

ชิ้นต่อมาเป็นส่วนที่เรียกว่าสำคัญมากเนื่องจากเป็นบอร์ดควบคุม ที่ใช้ BASIC Stamp P40 ในการควบคุม ... ตัวบอร์ดเป็นสีแดง (สำหรับผมแล้ว มันสวยดี ... ชอบๆ) โดยบอร์ดควบคุมนี้จะมีพื้นที่ว่างเอาไว้สำหรับ เราเพิ่มเติมวงจรตามที่ต้องการ ... มี Connector สำหรับเสียบกับ Motor และ Sensor ที่ติดเอาไว้ ... รูปของบอร์ดเป็นดังนี้ครับ

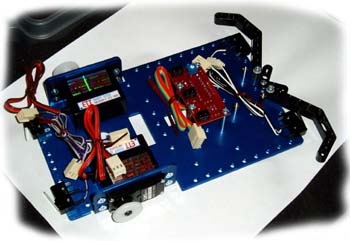
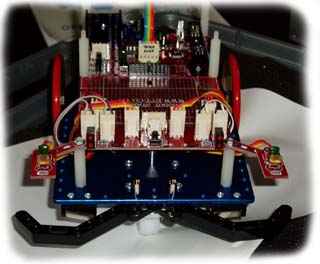
ตามด้วยส่วนของตัวโครงหุ่น ... เป็นโลหะน้ำหนังเบา (จำไม่ได้แล้วว่าทำจากอะไร ... เฮ้อ) สีน้ำเงิน (ชอบอีกแล้ว) บนตัวหุ่นนั้น ประกอบ Motor เอาไว้แล้ว และยังได้ติดตั้ง Sensor แบบ Switch เอาไว้ด้านหน้าข้างซ้ายและขวา ส่วนด้านหลังนั้นก็มี ติดเอาไว้เช่นเดียวกัน ข้างละ 1 ตัว ... รวมได้ว่า ตัวหุ่นนั้น ได้ติดตั้ง Switch สำหรับตรวจสอบการชนเอาไว้ 4 ตำแหน่ง ...

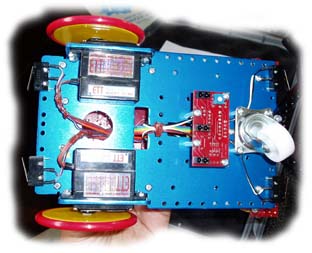
เมื่อมองดูด้านใต้ของโครงหุ่น ก็จะพบ Sensor สำหรับทำการตรวจจับเส้น (Tracker Line) เอาไว้ ดังรูปด้านล่างนี้ครับ
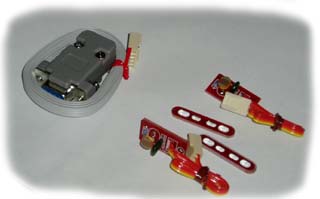
รูปด้านล่างนี้จะเป็น สาย RS232 สำหรับ Download โปรแกรมลงบอร์ดควบคุม และมี Sensor ตรวจจับแสง ที่ทำจาก LDR อีก 2 ตัว ... ตอนนี้ก็จะได้ว่า นอกจากตรวจสอบการชน, Track Line แล้วยังตรวจจับแสงได้อีก 1 อย่าง ...
มาดูส่วนเคลื่อนตัวกันบ้างครับ ... ทาง ETT เลือกใช้ล้อแบบพลาสติกที่หุ้มขอบล้อเป็นยาง ... ตัวล้อเป็นสีเหลือง และล้อยางเป็นสีแดง ... ส่วนล้อพยุงนั้น เป็นล้อเลื่อน ดังนั้น หุ่นตัวนี้จึงเป็นหุ่นยนต์รถ 3 ล้อ ที่ขับเคลื่อนด้วย Servo 2 ตัว และใช้ล้อเลื่อนเป็นตัวพยุง ให้มีการเคลื่อนตัวไปในทิศทางต่างๆ

นอกจากนี้ทาง ETT ก็ได้ให้ชุดเฟืองของ Servo Motor , ชุดเสาค้ำ+น็อต สำหรับยึดกับโครงรถ หรือ บอร์ดควบคุม และยังมีเทปพันสายไฟอีก 1 อัน ตามรูปด้านล่างครับ
 |
 |
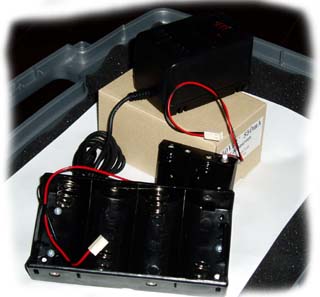
ชิ้นส่วนกลุ่มสุดท้าย เป็นแหล่งจ่ายไฟครับ ... แหล่งจ่ายไฟนี้มีให้เลือก 3 แบบ คือ จ่ายไฟจากลังถ่านขนาด AA หรือ A และ มีหม้อแปลงขนาด 850mA มาให้อีก 1 ตัว ... การเลือกใช้ลังถ่านนั้น ขึ้นอยู่กับความต้องการของเราครับ ว่าจะให้หุ่นยนต์ทำงานนานแค่ไหน (เรื่องแหล่งพลังงานนี้เป็นปัญหาใหญ่มากสำหรับคนที่ชอบทำหุ่นยนต์ครับ เพราะเวลาไฟมันอ่อนๆ เนี่ย มันวิ่งช้าลงเรื่อยๆ ทำให้การทำงานของโปรแกรมนั้น ผิดพลาดอย่างมากเลยล่ะ ... แต่สนุกดีใช่ไหมครับ :D)
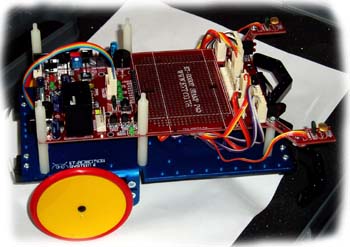
เอาล่ะมาประกอบกันดีกว่า ... ผมก็อาศัยคู่มือในการประกอบครับ เมื่อผมประกอบเสร็จก็ได้หน้าตาหุ่นยนต์ออกมาเป็นดังรูปด้านล่างนี้เลยครับ
 |
 |
 |
|
.. สำเร็จ ... ประกอบเสร็จแล้ว ... คราวหน้ามาดูตัวอย่างที่มากับ ชุด ET-ROBOT STAMP P40 กันนะครับ ว่ามีตัวอย่างอะไรบ้าง ... ส่วนบทความตอนนี้ก็ขอจบเพียงเท่านี้ก่อน เพราะคลายเครียดได้พักนึงแล้ว ... ทำงานต่อดีกว่า ฮาๆๆ ... สุดท้ายนี้ต้องขอขอบคุณ ETT และ คุณกอบกิจ เติมผาติ เอาไว้ ณ ที่นี้ด้วยครับที่ได้ส่งตัวอย่างหุ่นยนต์มาให้ทดลอง ... แล้วพบกันใหม่อีกครั้งในเรื่องของตัวอย่างโปรแกรมครับ